Kaho Wang 王家浩
I received the B.E. degree in Electronic information Engineering from Wuyi University in Jiangmen, China,which I received in 2020.Currently,I am pursuing a Master’s degree in Computer Technology at the School of Information Science and Engineering, also at Wuyi University. My research interests primarily focus on robotics, autonomous driving, intelligent information processing, artificial intelligence, and optimization theory.
As a full-stack Robotics, I possess a strong passion for robots and have extensive experience in designing, building, and controlling complex robot systems independently. I have a track record of successfully completing various projects related to robotics and automation.
To learn more about my interests and projects, feel free to follow my work on my Github and CSDN blog.
Skills
Linux,RTOS,STM32,Arduino,Raspberry Pi,Rk3399,Esp8266
Kalman Filter,Factor Graph,Nonlinear optimization,ROS,Gazebo,PID,Lidar,Gnss,Imu,Motion Capture,Camera,Encoder
C++,Python,Git,LaTeX,OpenCV,Gtsam,Ceres,Cuda,Pcl,Open3d,g2o,Sophus
Working Experience
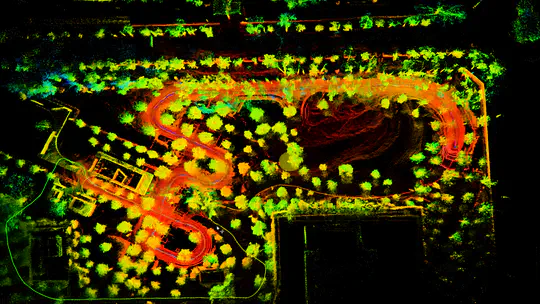
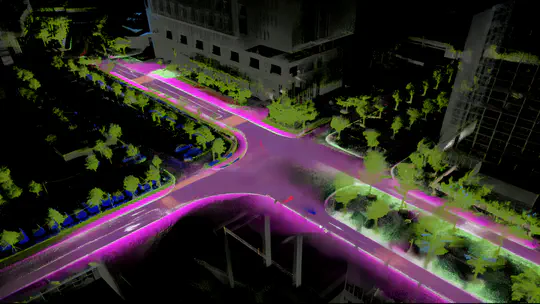
Large scale mapping and automatic vectorization of lane lines.
- Designed and set up a portable data collection device for mapping using Livox solid-state LiDAR, Hesai 32-line LiDAR, IMU, and GNSS.
- Utilized FASTLIO-SAM to reconstruct a large-scale 5km point cloud base map with no overlapping visually and clear intensity-reflected lane lines. Loop closure and GPS prior factors were integrated into the factor graph optimization process.
- Developed an automatic vectorization system for lane lines using Mask2Former network. The system performed semantic segmentation on image data and extracted 3D lane line point clouds through camera and LiDAR extrinsics. The 3D lane lines were then clustered and curve-fitted, achieving high-precision automatic vectorization of lane lines in the map.
- These efforts demonstrate my strong expertise in robotics, mapping, and data analysis, as well as my ability to independently design and implement complex systems. My work can be further explored and followed on my Github and CSDN blog.
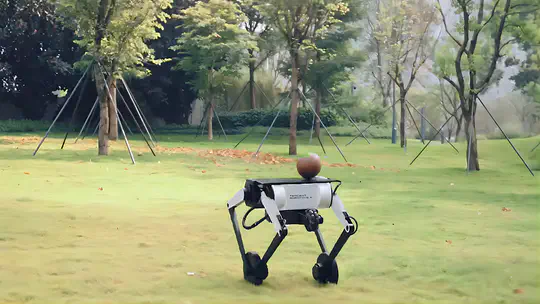
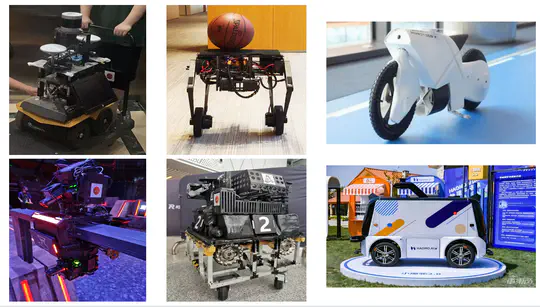
Development of Wheeled Bipedal robot Ollie’s motion control and Multi-sensor fusion mapping robot.
- Designed and set up Ollie ball balancing motion control system using high-resolution tactile sensors,motor,imu,motion capture.
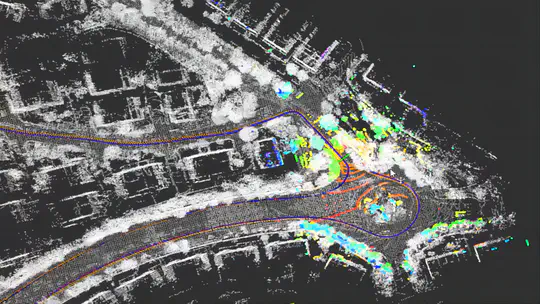
- Development of algorithms for indoor-outdoor mapping and localization robots, including front-end odometry, loop detection, and back-end optimization.
- Multi-sensor (IMU, GNSS, Lidar) data Processing, including driver development, data collection, sensor time synchronization (hardware and software synchronization), point cloud processing (distortion correction, ground segmentation, point cloud clustering, feature extraction).
Projects