Large scale mapping
 Localization based on prior map matching
Localization based on prior map matching
Large range (5km*5km) point cloud map construction, front-end method is FASTLIO2, back-end optimization using ISAM2:
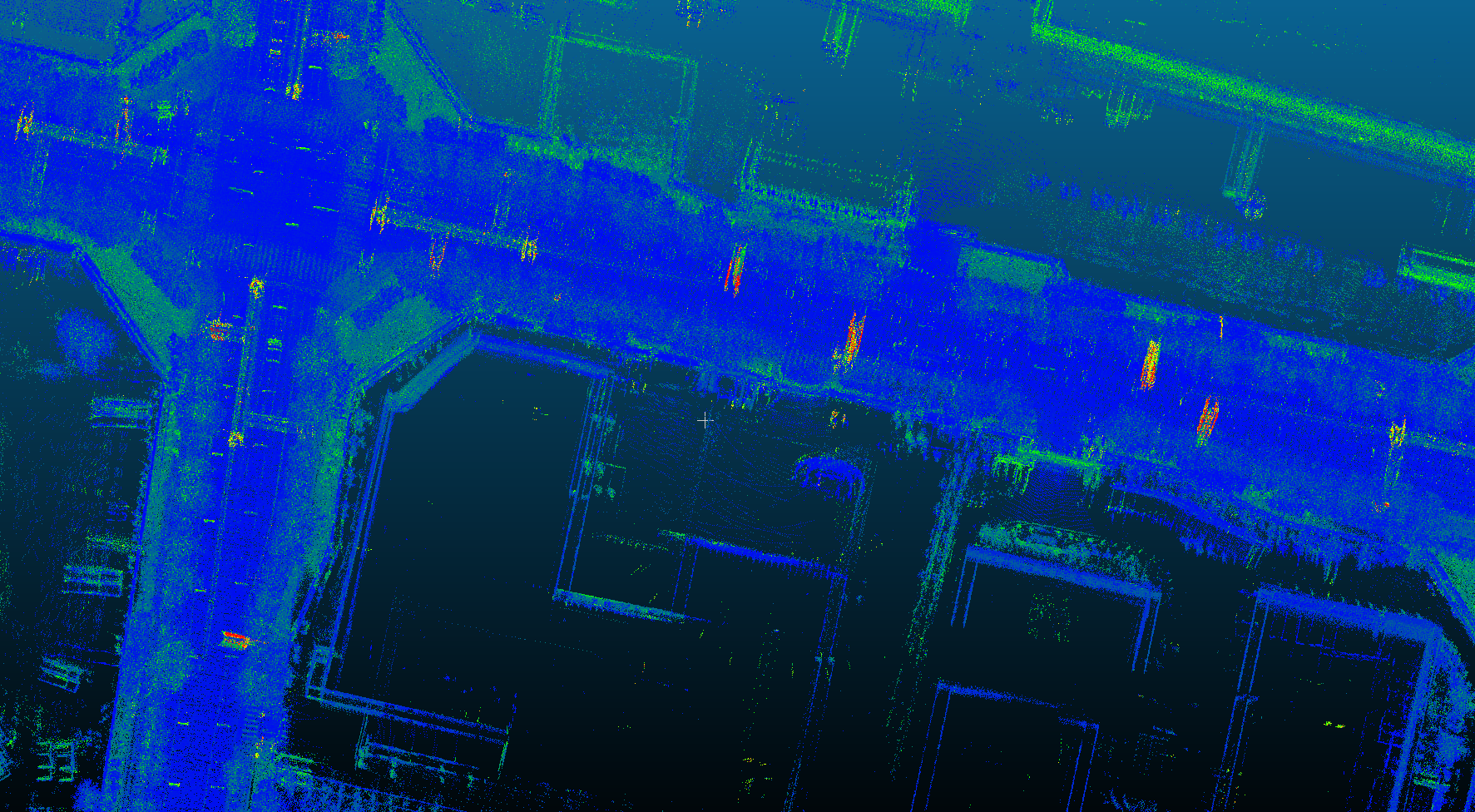
before optimization
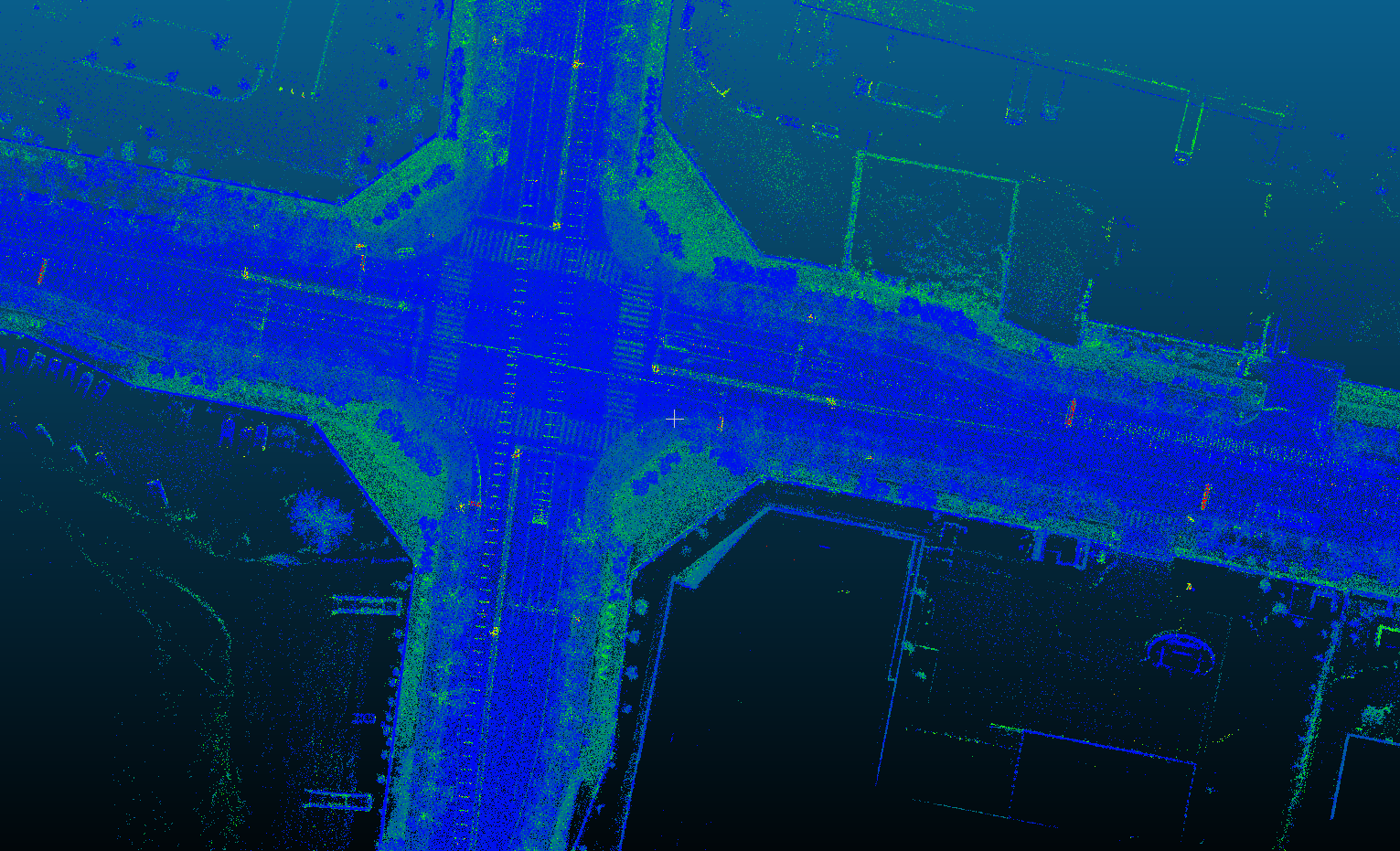
after optimization