 Localization based on prior map matching
Localization based on prior map matching
ESKF Localization
Localization:
Based on ESKF localization . Measurement factors include Wheel encoder , RTK , and PointCloud matching. Prediction factors include IMU Inertial calculation.
ReLocalization Initialization :
The position information is provided by the single point gnss, the initialization yaw is provided by ScanConext matching, and the precise matching is performed by ICP .
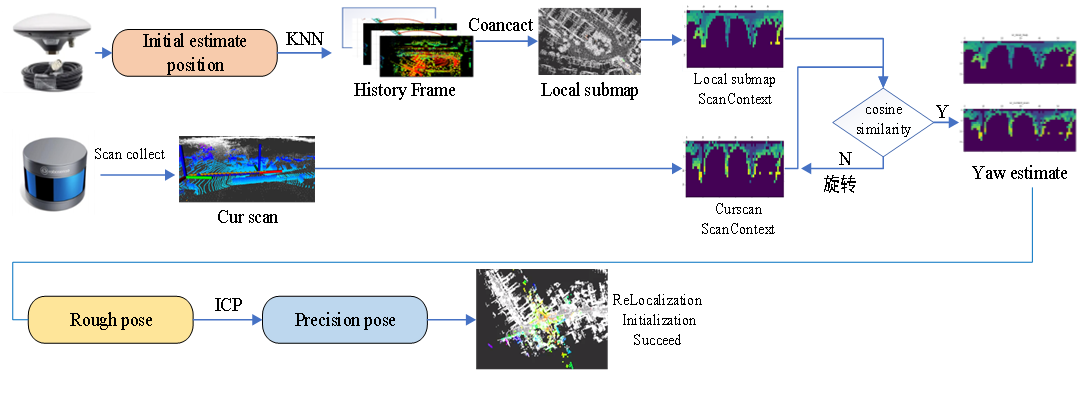
ScanContext Fast ReLocalization Initialization Framework
Use scancontext descriptor for 360 degree point cloud matching
ESKF Localization
Relocalization Initialization base on ScanContext
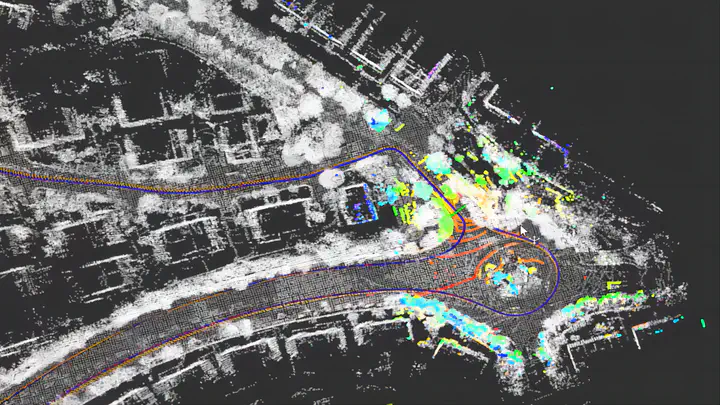
Localization Visual on Mapviz