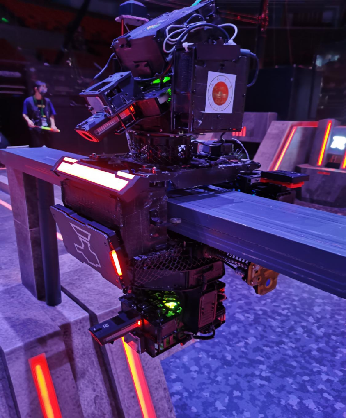
Manual Handle data record platform
In order to quickly verify the algorithm , we built our owndata record platfor(handle & package). After many iterations, now out platform can compatibility a variety of lidar(Tested:Hesai32、Robosense32、Livox mid70...), IMU(Tested: Xsens mti710、Lpms ig1) and camera(Hikvision、Intel D435i). We also carried out hardware synchronization and external parameter calibration on our equipment.
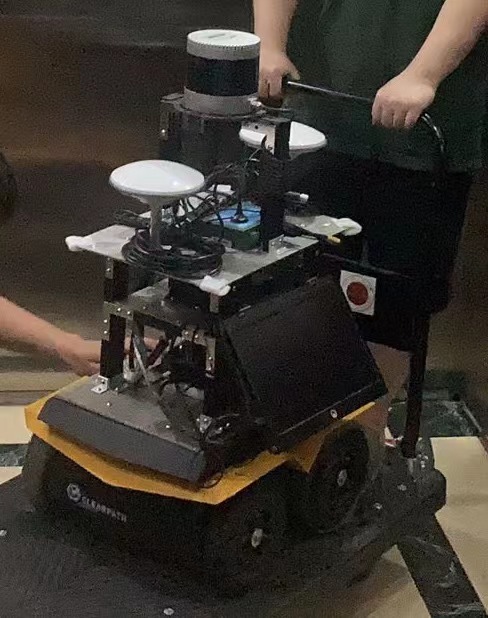
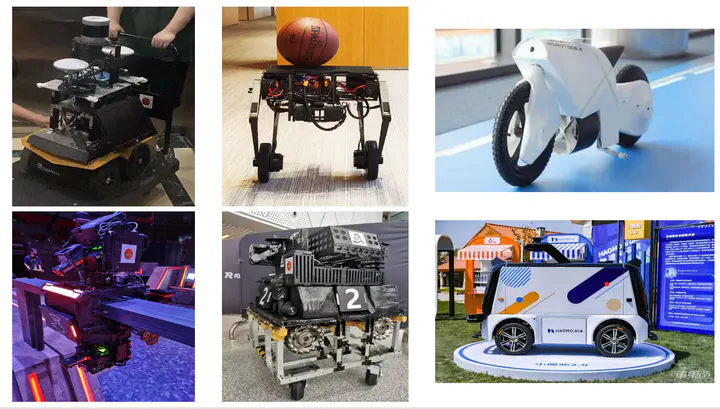
3D slam platform for Wheeled robot
It is composed of Lidar, IMU, RTK, Encoder and Jackal chassis. It is applied to the fast slam algorithm verification.
Wheeled Bipedal Robot Ollie
Design by Tencent Robotics X,based on WBC and Nonlinear control.
Self-balancing bicycle robike
Design by Tencent Robotics X,based on Gain Scheduling Controller.
Haomo.ai's HDeliver "小魔驼", L4 driverless delivery vehicle.
From 2017 to 2019, as the captain of the IMCA Robotics Team at Wuyi University, I participated in robotics competitions and was mainly responsible for embedded development and intelligent recognition.
 Localization based on prior map mat v ching
Localization based on prior map mat v ching